
DE INTERèS

El estudiante de la carrera de IngenierÚa Mecatrµnica de la Facultad de IngenierÚa (FI) de la Universidad Nacional de Cuyo, Maximiliano GarcÚa Girµn, creµ un robot para la bºsqueda y rescate de elementos peligrosos.
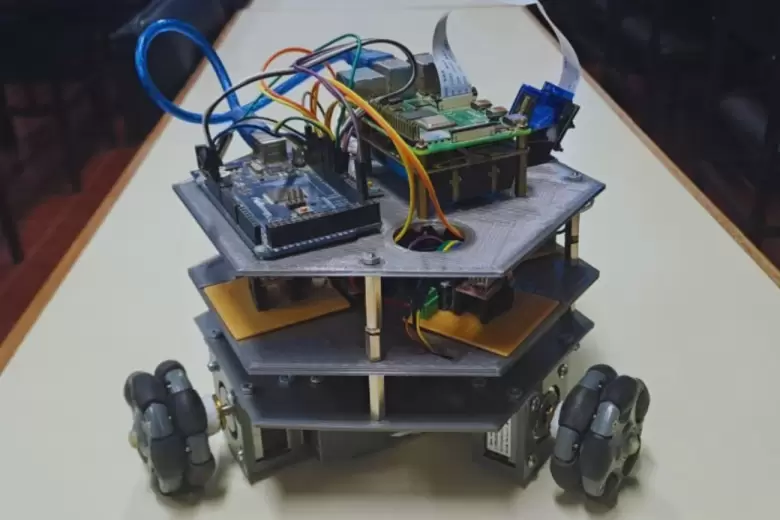
Exploraciµn aumentada mediante robot holonµmico diferencial con visiµn robµtica para bºsqueda y rescate, es el nombre del proyecto final de la carrera del alumno. En compaþÚa de Selva Rivera y en su presentaciµn, explicaron que se trata de un robot teleoperado con capacidad de detectar y clasificar elementos claves del entorno mediante visiµn artificial y con conocimiento de su ubicaciµn mediante un sistema de navegaciµn odomÕtrico-inercial.
AdemÃs, aclararon que la Informaciµn que recolecte, lo puede disponer el operario a travÕs de una interfaz en computadora para explorar en forma remota entornos.
Maximiliano GarcÚa Girµn trabajµ el proyecto con un abordaje multidisciplinario que incluyµ:

- El diseþo, construcciµn y modelizaciµn de todos los elementos de la plataforma holonµmica diferencial.
- La programaciµn del control electrµnico de los motores.
- El desarrollo e implementaciµn del sistema de visiµn robµtica con todas las etapas de diseþo y aprendizaje de IA.
- El sistema de navegaciµn odomÕtrica-inercial con filtrado de Kalman.
- La interfaz de usuario y la comunicaciµn entre todos los subsistemas que corren en un microcontrolador, una SBC y una computadora.












